Learning Flow-Guided Registration for RGB-Event Semantic Segmentation
Zhen Yao, Xiaowen Ying, Zhiyu Zhu, Mooi Choo Chuah
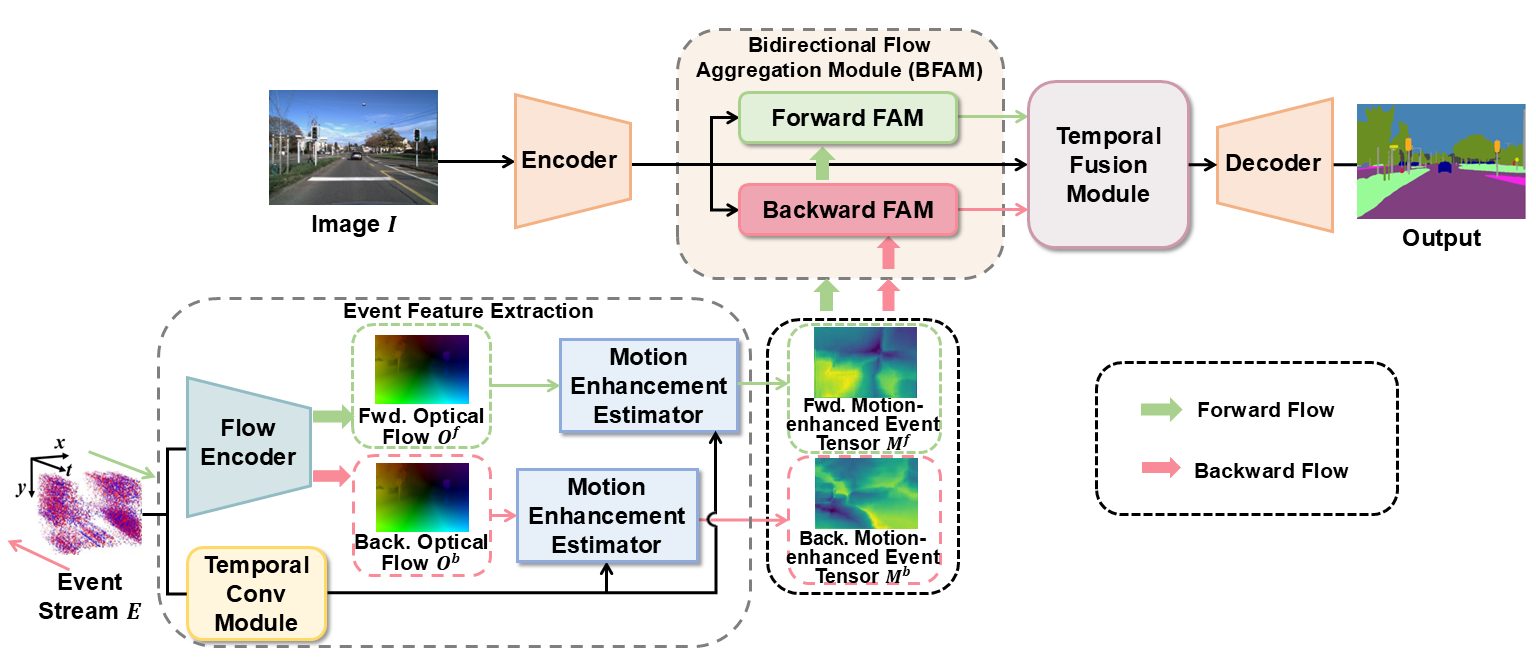
TL;DR: We recast RGB-Event segmentation from fusion to registration via a novel flow-guided registration-centric framework and introduce a new Motion-enhanced Event Tensor (MET) representation, mitigating spatiotemporal and modal misalignments.
[Paper] | [Code] | [arXiv] | [BibTeX]